
Overview
For those guys who likes building robots, a small and powerful motor driver could offer great help. And we are always trying to supply this kind of motor drivers. So here comes this new driver.
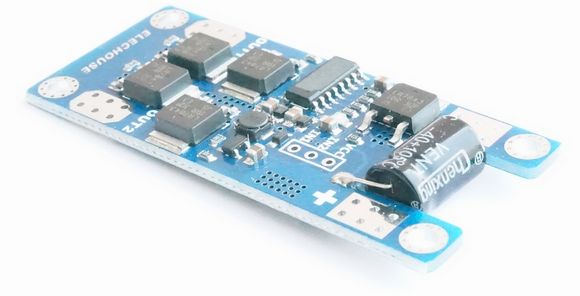
This small single-channel motor driver module can control the motors direction and speed. It could offer large current to motors. In open area and without any heating dissipation device, it could work stably at 20A current, with temperature rising around 20 Celsius. The drivers performance far exceeds MC33886 or L298N motor drive. Comparing with BTS7960, its continuous current capability is twice, and the peak current is 4 times, with only half of on-resistance.
This module consists of a full-bridge chip and four low-resistance MOSFET tubes. The MOSFETs on-resistance is only 0.003 ohms. This driver could start the motor in short time.
This motor driver module can work full at 0% – 100% of PWM duty. In fact, it is more more than a motor driver. It could also serves as a power controlling module.
Feature
Large current tolerance
Stackable design: two drivers could stack together to be more powerful
Anti-reverse power input
Compact size: 26.8mm x 62.0mm x 8.0mm
Parameter
VCC supply: 2.6V ~ 20V
Max working current: 20A
Peak working current: 160A
Motor VIN supply: 5V~ 30V
PWM TTL level: 2.5V ~12V
PWM duty range: 0%~100%
Max PWM frequency: 100Khz
Code:
int RPWMB = 10;
int LPWMB = 12;
int led= 13;
void setup()
{
pinMode(RPWMB,OUTPUT);
pinMode(LPWMB,OUTPUT);
pinMode(led, OUTPUT);
}
void loop()
{
//RUN BOTH CHANNELS SIMULTANEOUSLY FORWARD
digitalWrite(led,HIGH);
analogWrite(RPWMB,127); // RUN AT 50% SPEED
digitalWrite(LPWMB,HIGH);//RUN RORWARD
delay(2000);// WAIT FOR 2 SECONDS
// STOP AND BRAKE
digitalWrite(led,LOW);
digitalWrite(RPWMB,HIGH);//RPWM
digitalWrite(LPWMB,HIGH);//LPWM
delay(2000);// WAIT FOR 2 SECONDS
// RUN IN REVSERSE
digitalWrite(led,HIGH);
digitalWrite(RPWMB,HIGH);//RUN MOTOR REVERSE
digitalWrite(LPWMB,LOW);//RUN BOTH MOTORS AT 100% SPEED
delay(2000);// WAIT FOR 2 SECONDS
// STOP AND BRAKE
digitalWrite(led,LOW);
digitalWrite(RPWMB,HIGH);//RPWM CHANNEL A,B = HIGH
digitalWrite(LPWMB,HIGH);//LPWM CHANNEL A,B =HIGH
delay(2000);// WAIT FOR 2 SECONDS
}

